 NPA-700B-001D差压7Kpa压力传感器2字节
¥98.00
NPA-700B-001D差压7Kpa压力传感器2字节
¥98.00
- 商品
- 详情
PNI13104自动感应车辆的停车时间地磁传感器RM3100
- ¥15.52 10 - 99
- ¥14.52 100 - 999
- ¥13.52 ≥1000
参数
- 地磁传感器产品特性
- PNI品牌
- PNI13104型号
广东 深圳
3天内发货
3000PCS
NPA-700B-001D差压7Kpa压力传感器2字节
¥98.00
产品详情
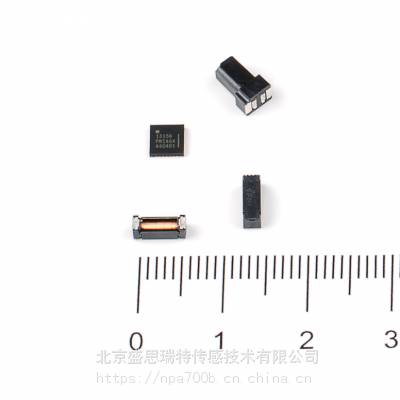
型号:RM3100
类型:套件
测量范围:±800uT
分辩率:26nT
线性度:0.50%
供电电源:3V
工作电流:50mA
工作温度:-40~+85℃
通信接口:SPI、I2C
尺寸:N/A
供电电源:3VDC
RM3100磁传感器套件是由2个X/Y轴磁传感器Sen-XY-f(13104),1个Z轴磁传感器Sen-Z-f(13101)和1个ASIC控制器MagI2C(13156)组成。10倍于霍尔传感器的分辨率和低于20倍的噪音,使得RM3100成为了同类产品中性能的磁传感器,***了航向和方位测量的***性。基于***磁感技术的PNI传感器不仅具备***噪音下的高分辨率和重复性数据输出,而且采样***、无磁滞现象,也不需要进行温度校准。
在使用地磁传感器进行地球磁场测量时,经常会因为系统其它部件如电池、防护外壳和马达等改变传感器附近磁场,此外,暂时变化的磁场也会影响地磁传感器对航向的测量,如家具、经过的汽车、手机、电脑。对于此类情况,则需要传感器能够准确辨别环境中的噪音、干扰以及实际变化。PNI RM3100套件能够准确识别这些“模糊"信息,从而消除因此而带来的测量偏差,精准的对方位进行判断。
地磁传感器是用来测量地球磁场大小,进而提供的方向参考。但这面临一个比较大的问题是,变化性磁场对判断方位信息的暂时性影响。比如家居中的金属、经过的车辆、附近的移动手机和计算机。要补偿和校准这些情况下磁异常,需要地磁传感器能够准确区分噪音和变化值。
2.1 实验数据
实验选取2015年8月2日0时至24时全天的视频检测数据数据进行参照。地磁检测系统每5分钟提取一次断面的平均车速(平均车速=每5min内通过车辆速度总和/通过车辆数 ),剔除掉高于120km/h的异常数据后,可得以时间为X轴,各地磁断面平均车速为Y轴统计图(图中D2、D3、D4速度分别为断面2、3、4的平均时速,横坐标288个刻度为5分钟间隔序号)。
根据均速模型算法,地磁检测的排队长度与视频实时排队长度对比如图4(虚线为地磁检测数据,实线为视频检测数据)。根据Spearman秩相关检验法,得地磁检测排队长度与视频检测排队长度相关度达92.3%,实验结果达到预期值。
2.2 结果分析
由上述实验结果可以得出,本文提出的均速模型与现场视频检测结果高度吻合,综合实验中出现的异常情况,该均速模型受到的客观干扰主要存在以下两个方面:(1)收费站前不同车道车型不统一,需要结合车型识别对车辆经过断面产生的相对车速进行改良,减少测速扰动;(2)受到驾驶员行为影响,车辆会自动变道寻找排队长度***车道。
在收费站前排队长度较短情况下,车辆经过外围两道地磁断面时有可能出现变道情况,带来测速异常高值,需要进一步在均速计算中剔除明显异常高值。由于受到算法影响,在断面2、3存在异常高值情况时一般在距离收费站口较近的断面1不存在车辆变道情况(已经选好车道),故对系统判断车辆真实排队长度不产生影响,鲁棒性强。
另外,本文提到的收费站口排队长度检测系统可以进一步推广到城市交叉口信号检测中,结合平均车速直接辨别有利于直接判别拥堵情况,无需复杂的算法和数据处理,对处理器运行能力要求较低,便于推广。
三、结束语
结合跟驰模型中车辆行进行为以及MISSION模型对驾驶员行为的研究,得到了基于地磁传感器判别车辆行进情况的拥堵、畅通阈值,形成了对车辆排队长度有效估计的均速模型。
通过现场试验,证明了该模型的有效性。与传统视频检测、浮动车检测、微波检测方法相比,本文提出的排队长度算法更为简单,易于实现。另外地磁传感器成本低廉,安装方便,有利于快速推广。
为您推荐
产品分类
更多 >
 在线问
在线问
产品参数
- 地磁传感器
- PNI
- PNI13104
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- RM3100
- 否
- RM3100
- 测量仪器
- RM3100
- RM3100
- RM3100
- 1000000480
