- 商品
- 详情
参数
- 实验检测产品特性
- -品牌
- SS-KNIBO6型号
广东 深圳
10天内发货
50套

产品详情
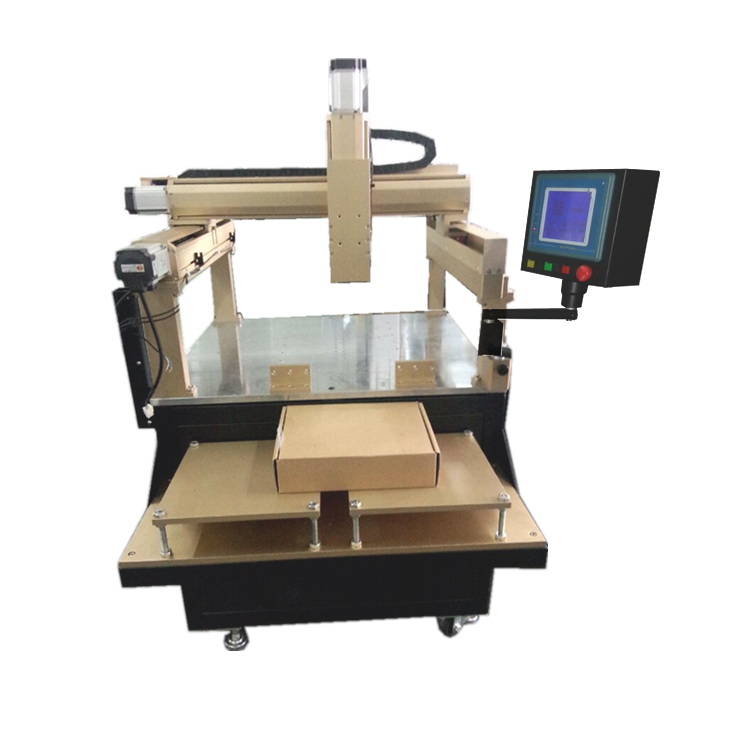
教学三轴搬运抓取识别平台非标定制坐标平台系统组成:
联系电话:18682203362
◆ 教学三轴搬运机器人(精度丝杠型,可选配线性光栅尺)
◆ 伺服电机
◆ 多轴运动控制器
◆ 触摸屏操作
◆ 电控机箱,AC220V电源输入
◆ 软件及操作手册,实验指导书
◆钻孔、铣平面、加工平面图形、加工3D工件
◆可控制到空间任意坐标位置
◆可任意位置设置为零点
◆自由编程
◆可进行二次开发
教学实验搬运机器人产品特点:
◆ 核心控制部件采用***的独立式多轴运动控制器
◆ 运动部分采用重复定位精度高的运动控制平台
◆ 开放式结构,学习效果举一反三,一劳永逸
◆ 学用结合,即可用于教学,也可作为实际工业产品应用
◆ 体积小,功能强,一机多用,不仅可以进行多项实验操作,而且还是控制软件设计的理想平台
实验内容:
◆ 各种机电控制系统认知实验,熟悉系统组成、功能及控制原理。
◆ 运动本体设计及运动实验,以精密定位平台为例进行运动机构加减速特性实验,系统力学模型建立实验。
◆ 运动本体机构实验,熟悉精密定位平台的丝杠、导轨、螺母副、联轴器等机械构件,对运动及定位精度进行分析计算。
◆ 机电控制元部件教学,学习步进电机,伺服电机的特性和选择。
◆ 机电系统反馈测量传感器,执行元件安装维护及选型联接实验。
◆ 体验步进电机,直流有刷伺服和无刷伺服的区别。
◆ 掌握采用不同伺服环(位置环,电流环,速度环)进行调试设备和进行加工的区别。
◆ 系统分析,数学模型建立并对系统进行PID调整实验。
◆ PLC编程,运动程序编制,编译G代码,G代码编程,数控软件编程实验。
◆ 开展CAD,CAM实验
◆ 上位机软件编程实验。
◆ 数据采集分析实验。
◆ 整体机电控制系统及系统评估实验。

为您推荐
 在线问
在线问
产品参数
- 实验检测
- -
- SS-KNIBO6
- 滑台
- 铝型材、钣金
- 950*900*1560
- 检测、高校实验、打孔打磨、点胶打螺丝
- 现货
- 是
- 是
- 是
- -