
 高可见高跟踪性的标记点:AimMarker艾目易反光小球
¥35.00
高可见高跟踪性的标记点:AimMarker艾目易反光小球
¥35.00
- 商品
- 详情
参数
- 非标定制化产品特性
- 否是否进口
- 广州产地
广东 广州
不限
5套
高可见高跟踪性的标记点:AimMarker艾目易反光小球
¥35.00
产品详情
手术机器人科研系统
手术机器人科研系统主要由艾目易公司自研的光学定位系统和手术机器人SDK,搭配机械臂共同构成,开发人员可基于手术机器人SDK进行二次开发,实现手术机器人系统的开发。
一、硬件部分
控制系统(硬件)主要包括主机、屏幕和操作台面。其中主机包括UPS不间断电源、隔离变压器、滤波器、高性能工控机等。
机械臂支撑系统主要由UPS不间断电源、隔离变压器、滤波器、电动升降支撑与控制器、开关电源、以及机械臂控制箱等组成。
光学定位系统可选AP-LIT-100、AP-STD-200+光学定位系统台车。
机械臂可选择UR大族思灵遨博珞石等机械臂
耗材与定位工具主要包括刚体工具、探针工具、AAK精度验证工具、注册版工具及反光小球。
二、软件部分
主要为手术机器人SDK,手术机器人SDK的开发环境为“windows+VS2017以上+QT5.12”,开发语言为C++,同时为用户提供示例工程与API文档,示例工程可实现从“影像导入-三维可视化-手术路径规划-空间注册-机器人标定-机器人导
航”全过程。
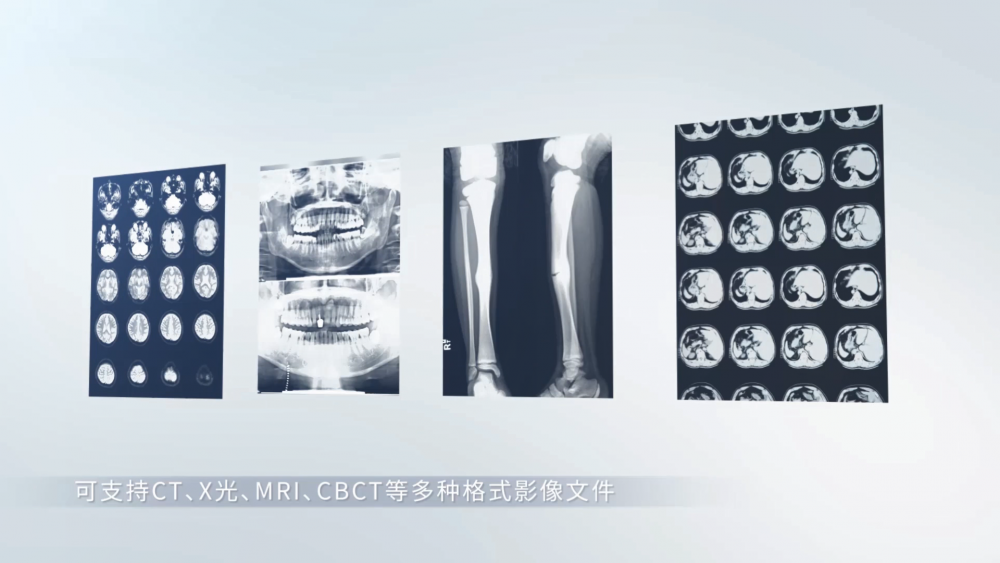
01 影像管理模块
该模块提供的接口包括:文件加载、文件信息获取、文件信息设置、文件输出、文件关闭,能处理CT/MRI/CBCT等医学影像DICOM数据,实现影像数据解析与加载。开发人员可以基于该模块获取到的影像数据,自行进行图像分割、图像融合等二次开发。
02 手术规划模块
该模块主要包含二三维影像显示、选点与交互的相关接口,可以实现三维可视化、二三维界面的交互以及二维面上点的选取(选取的点可以是手动选取或数据自动生成),开发人员可根据需求实现路径规划的二次开发。
03 手术导航模块
该模块提供的接口包括:定位仪控制的相关接口、标记球提取、空间注册、工具注册和工具信息读取等,实现图像空间与实际空间的配准、手术工具末端信息获取以及导航功能。
04 机械臂控制模块
当前支持UR大族思灵遨博珞石等机械臂,该模块提供的接口包括:机械臂控制、机械臂标定、机械臂导航、定位仪与机械臂的坐标转换、以及VTK三维坐标与定位仪坐标转换,实现机械臂导航功能。
三、SDK(Software Development Kit)包含的内容及服务:
1. 文档和示例代码:提供详细的文档和示例代码,包括SDK的安装、配置和使用方法。文档应该是清晰易懂的,示例代码可以帮助***快速上手。
2. ***支持:提供技术支持和交付培训,解答***的问题并及时提供更新和修复。建立积极的社区氛围,鼓励***之间的互动和知识分享。
3. 应用案例和参考项目:不定期展示成功的应用案例和使用该SDK开发的项目,演示SDK的功能和优势。
4. 手术机器人生态:与相关行业厂商(机械臂、力反馈、遥操作、手术器械、模型厂商、影像设备等)、研究机构(高校、医院、科研院所)或***社区建立合作伙伴关系。
5. 培训和研讨会:不定期组织培训班、研讨会或在线教育,向***介绍和培训SDK的使用。传达产品的价值和能力,并提供交流和学习的机会。
6. SDK社区活动:组织SDK使用者的社区活动,如比赛、Hackathon或***大会等。激发创造力、促进合作,并增强用户对产品的忠诚度。
7. 试用和评估版:提供免费的试用版、免费试用时间或免费***账户,让***能够体验和评估SDK的功能和性能。
8. 反馈机制:建立反馈机制,鼓励***提供意见和建议。积极回应用户反馈,改进和优化SDK的功能和性能。
四、艾目易科技介绍
艾目易科技有限公司成立于2017年,是一家集研发、生产、销售为一体的高科技公司,公司定位于智能手术一体化解决方案提供商,长期专注于光学定位系统与手术机器人的研发与应用,致力于为手术机器人厂商、医院和科研院所提供个体化与定制化的智能手术产品和服务。 艾目易于2019年成功研制出国内的
近红外光学定位系统,目前已广泛应用于手术导航、手术机器人及其他以“精准定位”为主导的医疗场景。公司已完成“AI+手术机器人”的智能化手术产品线布局,打造了覆盖手术全流程的闭环产品矩阵,包含光学定位系统、手术机器人、光学定位耗材、配套定位工具等系列产品,逐步形成覆盖骨科、神经外科、牙科
等多个专业领域的智能手术整体解决方案,已为国内手术机器人相关厂商提供光学定位解决方案,有效解决国产替代问题。同时逐步拓展工业领域的应用,支撑国内机器人产品升级,为工业领域客户创造更多智能化场景。艾目易已通过国家高新技术企业、全国科技型中小企业、广东省创新型中小企业、广东省名优高新技术产品、广州市科技小巨人、双软企业等相关认证,已获授权***28项,曾获得2022年“创客中国”中小型企业创新创业大赛全国***。
为您推荐
-
-
高可见跟踪性,标记检测的AimMarker艾目易球 ¥35.00
-
-
-
AimMarker艾目易高可见反光小球,逆反射图层 ¥35.00
-
精准检测反光AimMarker艾目易球,卡扣式结构 ¥35.00
-
提供无菌包装的高可见标记球AimMarker艾目易供应 ¥35.00
-
-
-
-
AimMarker艾目易球:高可见反光,可供无菌包装 ¥35.00
-
精准检测!AimMarker-115反光小球带卡扣式结构 ¥35.00
 在线问
在线问
产品参数
- 非标定制化
- 否
- 广州
- 是
- 艾目易
- ASRES-100
- 手术机器人SDK