- 商品
- 详情
查找查找详见2D中的同名内容,此功能可以将3D图片整体旋转为模版的方位,进行同位测量高度。查找模板算法:作用是在二维图面上进行定位,因为产品摆放总会有偏差,而其他的ROI是不会自动跟踪的,所以我们建立一个模板,以一个特征区域进行定位,自动校准图面,这样其他的ROI就会大致在原来模板的区域,这样的测试才是***。双击ROI,里面有个定位选项,点击后可以得到下图,金字塔1级就是全尺寸匹配模板的红色轮廓(三个滑槽可以实验),当得到满意的轮廓后,苏州Gocator24103D相机原理,可以点击添加工具,就实现了定位加载到ROI1下面。那么为什么要提这个模板算法,因为有时候产品模型变,就需要这里变化。修改完后,立即在图面上右键注册图片一下,苏州Gocator24103D相机原理,然后测试图片看看,就有效果,苏州Gocator24103D相机原理。 3D快照传感器或传感器组网系统来完全消除遮挡区域,使连接件能被完整地检测到。苏州Gocator24103D相机原理

行业现状:采用传统的二维图像识解决方案无法用于轮胎DOT检测因为黑色的凹凸的字符在同样黑色的轮胎上,导致对比度为零,而且解决轮胎表面高吸光的特性也是有难度的。采用人工核对方式,存在耗时长、精细度差、易遗漏等问题,同时因非常时期影响,人工检测很多时候无法有序开展。但是对于3D检测来说,能够建立在2D检测的基础之上,提取出字符的三维信息,将自动采集轮胎信息,交由给软件处理,能够更加大部分的做出分析与判断。使用3D相机可以提高检测速度和准确度。常州系统集成商3D相机测量Gocator三维智能传感器在锂电池缺陷检测的应用。
LMI Gocator 2430/2440 一体式三维智能传感器:产品介绍Gocator2430和2440型号扩展了Gocator2400产品系列,专门针对橡胶和轮胎的应用,以及扫描中等大小的物体,如电子元器件、汽车零部件和产品包装。采用优近新200万像素成像技术和新的处理器,可实现更高的扫描速度和优越的重复性。•达到GOCATOR2300产品系列速度和灵敏度的2倍,扫描速度高达5kHz•可通过网页浏览器或SDK进行设置和控制•内置测量工具,无需任何编程•可扩展性,可用GocatorGDK及ACCELERATOR
3D的优势2D驱动系统只能在相对于机器人的平面上定位零件。另一方面,配备3D视觉的机器人系统可以识别在三个维度(即X-Y-Z)中随机放置的零件,并精细地发现每个零件的3D坐标。这是机器人拾取和放置的关键能力。Gocator快照传感器将使用蓝色LED结构光的边缘投影与丰富的内置3D测量工具和决策逻辑相结合,以高达6kHz的速度扫描和检测具有停止/移动运动的任何零件特征。蓝色LED将一种或多种高对比度光模式投射到物体上,让立体相机采集全视野3D点云,即使在具有挑战性的条件下也能提供***抗干扰的环境光。LMI计量级快照传感器与UR设备的结合提供了一个完整的机器人解决方案,可在机器人视觉引导、质量控制和智能拾取、放置的自动化装配中提供高性能3D解决方案。LMI 视觉3D相机软件下载。
3D线激光轮廓传感器采用激光三角反射原理。首先使用一束激光照射到被测物体表面,反射光经过光学透镜组在感光元件表面形成光斑,不同高度的表面反射形成的光斑位置各不相同。如下图所示,当被检测表面偏高时,测量激光光斑位置会右移;反之,如果被检测表面偏低时,测量激光光斑位置会左移。3D线激光轮廓传感器采用的不是点激光光源,而是一条激光线,测量光激光斑也是一条线,所以俗称线激光。线激光还可以面扫描,快速形成3D轮廓。乐姆迈,点云Blob工具。常州系统集成商3D相机测量
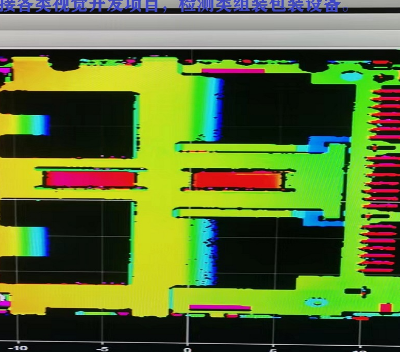
使用点云Blob工具从形状数据(即3D高度图)中提取特征,优于标准的2D分割。苏州Gocator24103D相机原理
3D检测原理:通过激光照射到产品上,反射到相机芯片上,形成一个三角形的关系,进而通过复杂的运算,得出产品表面的轮廓,又称点云图,3D相机经常运用于电子制造领域,用于识别PIN针的高度差共面度,用于机器人抓取搬运定位,用于轮胎的表面瑕疵检测。LMI3D相机主要有Gocator2300,Gocator2400,Gocator2500系列,这里我们主要介绍一下用于连机器PIN针高低差的检测。在此应用中,Gocator2420线激光轮廓传感器被用于扫描和检测连接件针脚,测量在线移动的连接件针脚,提供实时的通过/失败决策。如果没有可靠且覆盖范围广的质量控制,很有可能会造成有缺陷的连接件引脚的漏检,导致将不合格的产品发送给客户。能否获取正确的质量控制信息是产线能否做到高效率低成本的关键。连接件针脚是高反光的微小目标物,要达到要求的精度去满足几何公差,扫描和测量变得很有难度。特别是,针脚之间经常出现扫描数据中的噪声。此外,一些针脚要求传感器具有较大的测量范围,以便准确获取针脚的几何形状。苏州Gocator24103D相机原理
苏州虔坤图像技术有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在江苏省等地区的电子元器件中始终保持良好的商业***,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断***创新,勇于进取的***潜力,苏州虔坤图像技术供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!
 在线问
在线问
