- 商品
- 详情
- 非标定制化产品特性
- C++编程环境
- 7个模块数量

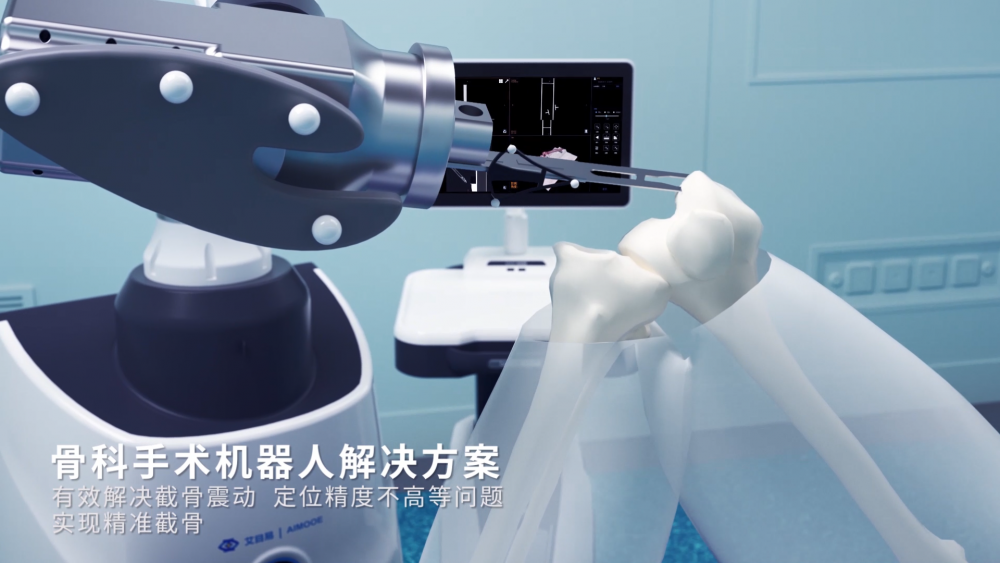
基于光学导航定位的手术机器人解决方案旨在提供***的实时定位和导航功能,以支持手术过程中的准确操作和安全导航。以下是由广州艾目易科技提供的功能模块,介绍了其实现原理和解决的问题:
1.医学图像处理模块:
实现原理:通过医学图像处理技术,对患者的图像数据(CT、CBCT、MRI等)进行分析、重建、分割,生成可视化的三维解剖结构模型。
解决问题:帮助医生清晰了解病灶位置及周边情况,为下一步手术规划做准备。
2. 手术规划与导航模块:
- 实现原理:结合光学导航信息和患者的医学图像数据,生成可视化的三维模型,并提供实时导航指引。
- 解决问题:帮助医生在手术前进行***的手术规划,同时提供实时导航指引,以确保手术操作按计划进行且准确无误。
3. 实时定位校准(标定注册)模块:
- 实现原理:利用自适应算法或其他技术,实时校准手术机器人的定位,以***准确的实时位置信息。
- 解决问题:避免手术过程中的累积误差(如患者移动、设备移动、组织形变等),确保机器人的定位准确性,提高手术操作的***度和安全性。
4. 智能机械臂控制模块:
实现原理:采用高精度力传感器、光学定位和***控制算法,实现对机械臂的***控制和协调运动。
解决问题:通过***控制和协调运动,减少手术中的不准确性和人为误差,提高手术的准确性和效率。
5. 光学导航模块:
- 实现原理:通过使用高分辨率的光学摄像头和特殊标记点或特征点(反光小球、反光贴片、近红外灯珠),识别和记录患者的解剖结构和手术器械的位置。
- 解决问题:提供准确的实时定位信息,帮助医生在手术中正确识别和操作目标区域,避免误切或损伤周围组织。
基于光学导航定位的手术机器人解决方案利用***的光学技术实现对患者位置和器官结构的***实时定位和导航,从而提高手术的准确性、安全性和效率。这种解决方案可以应用于不同类型的手术,并为医生提供可靠的技术支持和改善手术结果的机会。

 在线问
在线问
- 非标定制化
- C++
- 7个
- 30日
- SDK接口及说明文档
- 导航