
 供应龙门机器人 机床上下料机器人 冲压桁架机械手 重型龙门机器人
¥106.00
供应龙门机器人 机床上下料机器人 冲压桁架机械手 重型龙门机器人
¥106.00
- 商品
- 详情
参数
- 否加工定制
- 沁峰机器人品牌
- QF-5045-S3型号
广东 东莞
30天内发货
1000台
供应龙门机器人 机床上下料机器人 冲压桁架机械手 重型龙门机器人
¥106.00
产品详情
沁峰冲压机械手,专门针对冲压产品研发设计,融合了关节式机器人“高自由度”、以及传统连杆式机械手“高效稳定”的双重特性。同时沁峰冲压机械手***的配置以及优良的设计工艺,使其在安全性、高效性、节能性和稳定性等方面都表现***。
1、采用自主研发的机器人控制算法,实现五轴联动控制,针对冲压行业的送料特点,自动生成***运动轨迹,高效平稳地实现全方位、多角度冲压动作,生产效率达到15—20次/分;
2、采用国内外***品牌及自主研发配件,故障率1‰;
3、采用高性能伺服系统,具备断电位置记忆功能,避免复位回原点困扰,线路优化,整体性能***;
4、采用自主研发的正反齿轮背隙缓冲器核心***技术,定位误差控制在±0.2mm;
5、采用人机界面,识别双料,***模具、冲床误动作,保护机器人和冲床安全;
6、采用开放式可编程技术,支持运动轨迹编辑,柔性好,控制灵活,可存储多种产品信息,互换性强,一次设定即可长期使用;
7、与欧洲标准接轨的隔离稳压电源系统,功耗小、效***,稳压范围更宽(150-270V),有效延缓设备老化,提高使用寿命;
8、使用寿命8—10年(视生产环境及保养情况而定),全方位、多角度实现各种冲压动作:翻转、打废料(放料前)、侧挂或斜放、堆放等,并适应连续模、单机多模等模具工艺要求;
9、10kg机型***《一种重大件冲压机械手发明***》和《一种用于重大件冲压机械手的手臂结构实用新型***》,有效解决10kg重大件零件的高效、平稳抓取。
沁峰冲压机械手能适配于市面上所有类型的冲压设备:齿轮冲床、气动冲床、油压机,并做到无论吨位大小、机台高低,都可随意连接,实现设备自由组合。沁峰机器人的冲压机械手已形成高度标准化,只须定制抓手,安装便捷,交付三天量产,使用操作简单、人机界面能识别双料,防止模具或冲床误动作,是代替人工冲压的理想产品。下面让我们一起来看看,真实感受沁峰冲压机械手解决的实际问题。
一、抓料:抓料过程中,当遇到3㎏以上较重且为异形、腔体构件工件时,传统机器人无能为力,对于斜面抓取更是无从谈起。沁峰机器人系列产品能解决10kg以内任何形状、构造的工件的任意角度抓取,再复杂多变的工件及工艺要求,都能做到游刃有余。
二、放料:随着钣金冲压工艺的不断发展,中间需要翻转、打废料(放料前)、侧挂或斜放、堆放等动作越来越复杂,且要求精准定位,传统机器人无所适从。沁峰冲压机器人能解决360°任意角度的准确定位及放料,做到从容应对。
三、连线:冲压生产中,时常面临转产反复调试的头疼问题,特别是遇到技改项目升级时,传统机器人不可扩展,转型无门。沁峰冲压机器人智能运动控制卡能预存100组产品工艺信息,随时方便切换;哪里有需要,随时“调岗”连线。
冲压机械手技术参数
| 指 标 | 参 数 | |
| 抓取重量(kg) | ≤3kg | |
| 电源电压(V) | 150~270 | |
| 电源频率(Hz) | 50/60 | |
| 装机功率(KW) | 3.5 | |
| 平均耗电量(KW) | 0.5 | |
| 工作环境温度(℃) | 0~35 | |
| 工作环境相对湿度(%) | 55~95 | |
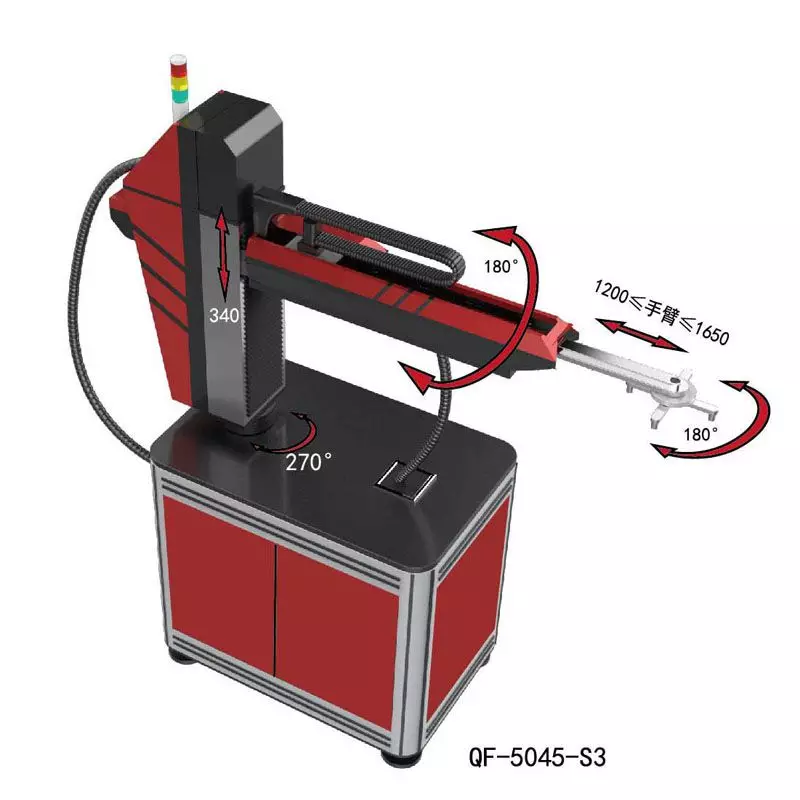
| 手臂摇摆角度(°) | 270 | |
| 手臂上下伸缩行程(mm) | 0~340 | |
| 手臂前后伸缩行程(mm) | 1200~1650 | |
| 手臂翻转角度(°) | ±180(四轴机型无此项) | |
| 取物吸盘旋转角度(°) | 360 | |
| 路轨行程(左右/前后)(mm) | / | |
| 生产效率(PCS/H) | 800~1000(约合15次/分) | |
| 送料精度(mm) | ±0.2 | |
| 工作半径(mm) | 1650 | |
| 机身尺寸(L*W*H)(mm)(H为变量) | 920*600*1750 | |
| 机身重量(kg) | ≈200 | |
同时,沁峰公司还可根据客户产品的量产工艺要求,灵活定制各类非标自动化设备,实现包括:自动换料、送料、钻孔、攻牙、喷油、定位等更多的自动化要求,达到冲压厂房无人化作业的目标。
沁峰冲床自动送料机
非标自动化设备
为您推荐
更多 >
-
金协冲压四轴摆臂机械手 面议
-
-
-
-
安川搬运机器人/安川冲压机械手维修当日修好 ¥1700.00
-
-
-
鸿羽供应内衣裁断机 布料裁切机 皮革冲压机 珍珠棉冲床 ¥8888.00
-
-
乐佰特冲压上下料工业机器人 佛山冲压机器人机械手 ¥5.00
-
-
 在线问
在线问
产品参数
- 否
- 沁峰机器人
- QF-5045-S3
- 冲压加工
- ISO9001