- 商品
- 详情
实景三维-武汉大势智慧
- 面议
湖北 武汉
不限

产品详情
实景三维-武汉大势智慧由武汉大势智慧科技有限公司提供。武汉大势智慧科技有限公司在信息技术项目合作这一领域倾注了诸多的热忱和热情,大势智慧一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌。相关业务欢迎垂询,联系人:吴先生。
精细配准是一种更深层次的配准方法。经过***步粗配准,得到了变换估计值。将此值作为初始值,在经过不断收敛与迭代的精细配准后,达到更加准确的效果。以***的ICP算法为例,该算法首先计算初始点云上所有点与目标点云的距离,***这些点和目标点云的zui近点相互对应,同时构造残差平方和的目标函数。ICP算法能够获得精正确无误的配准结果,对自由形态曲面配准问题具有重要意义。另外还有如SAA(Simulate Anneal Arithmetic,实景三维,模拟退火)算法、GA(Genetic Algorithm,遗传)算法等也有各自的特点与使用范畴。

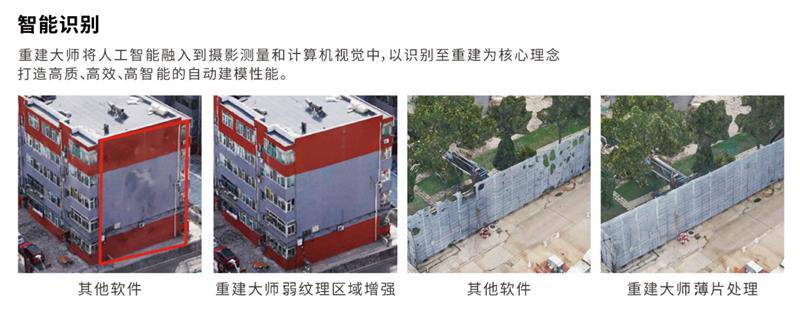
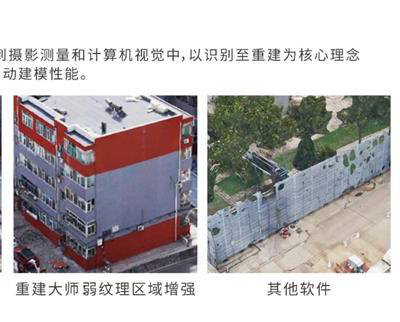
大势智慧是一家专注于真实世界三维数字化重建及三维数据服务的高新技术企业,公司在城市高精度三维建模、模型应用及语义化理解和文化遗产数字化保护领域具有***的技术优势和丰富实践经验。
三维重建的分类根据采集设备是否主动发射测量信号,分为两类:基于主动视觉理论和基于被动视觉的三维重建方法。
主动视觉三维重建方法:主要包括结构光法和激光扫描法。
被动视觉三维重建方法:被动视觉只使用摄像机采集三维场景得到其投影的二维图像,根据图像的纹理分布等信息恢复深度信息,进而实现三维重建。
经过配准后的深度信息仍为空间中散乱无序的点云数据,仅能展现景物的部分信息。因此必须对点云数据进行融合处理,以获得更加精细的重建模型。以Kinect传感器的初始位置为原点构造体积网格,网格把点云空间分割成很多的细小立方体,这种立方体叫做体素(Voxel)。通过为所有体素赋予SDF(Signed Distance Field,有效距离场)值,来隐式的模拟表面。
实景三维-武汉大势智慧由武汉大势智慧科技有限公司提供。武汉大势智慧科技有限公司在信息技术项目合作这一领域倾注了诸多的热忱和热情,大势智慧一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌。相关业务欢迎垂询,联系人:吴先生。
为您推荐
 在线问
在线问
产品参数