- 商品
- 详情
- 无人船产品特性
- 否是否进口
- 中国产地

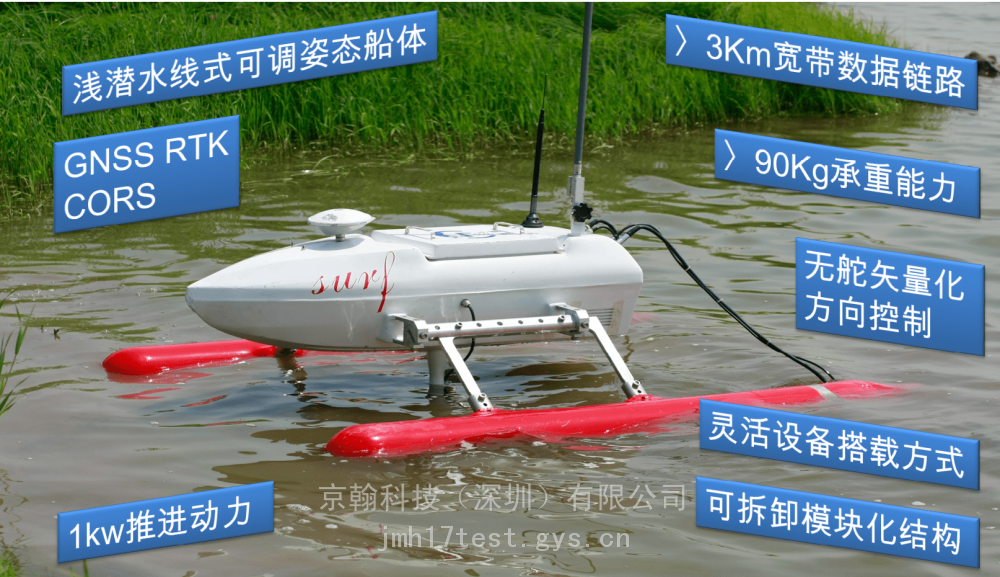
无人遥控测量船/多功能测量无人船

无人船水域测量机器人系统,是以无人驾驶遥控测量船为载体,集成GNSS、水深测量、陀螺仪、CCD相机等多种高精度传感设备,采用宽带无线传输的方式,在岸基实时接收并分析处理无人船系统所采集的数据,以遥控和自控两种方式对船体及船载传感器进行操作和控制。
本系统以河川、湖泊、海岸、港湾、水库等水域为对象,可主要用于浅海、江河湖泊、港口的水下地形地貌调查、水质水文考察、水下或岸边资源环境调查研究、搜索沉船等。系统可以程度上填***下测量领域载人船无法到达或不易到达的危险、浅滩、近岸等空白区域,真正做到高精度、自动化、高效益的单人(或双人)工作模式。
系统组成
本系统由A遥控测量无人船子系统和B 岸基控制子系统组成。
A 遥控测量无人船子系统
该船体设有动力系统、电源系统、船上控制系统、测深仪、陀螺仪、 GNSS定位模块、CCD摄像头和无线数据传输模块等。通过嵌入式编程技术,实现对船体的控制,以及各传感器数据的采集、融合和传输。
B 岸基控制子系统
该系统主要由交互式界面组成,通过无线传输协议,实时接收、分析、处理和显示遥测船体发送的数据,控制测量船自动或手动走线测量,并实现船只的自动回航,***对采集的数据进行数据处理以及图件的绘制。
系统特点:
测量条件困难区域的测量和调查
降低测绘成本,缩短工期
自动化程度高,行业开发便利
技术参数:
无人船体:***度玻璃钢体船
GNSS接收机:SNSS精度指标(RTK):平面±(10mm+1ppmxD);垂直±(20mm+1ppmxD);440通首;内置数传电台
单波束声纳测深仪:精度:±(1cm+0.1%水深);测程:0.3m~200m
CD摄像机:有效范围:97°
通讯,系统:标配2km通讯,距离
电池:20Ah 24V锂铁电池
水下电动推进器:3000转1分 400Wx2
天线电缆:3m
 在线问
在线问
- 无人船
- 否
- 中国
- 否
- 楚航
- 无人遥控测量船
- 测量无人船
- 见资料
- 见资料
- 测量无人船
- 无人遥控测量船