- 商品
- 详情


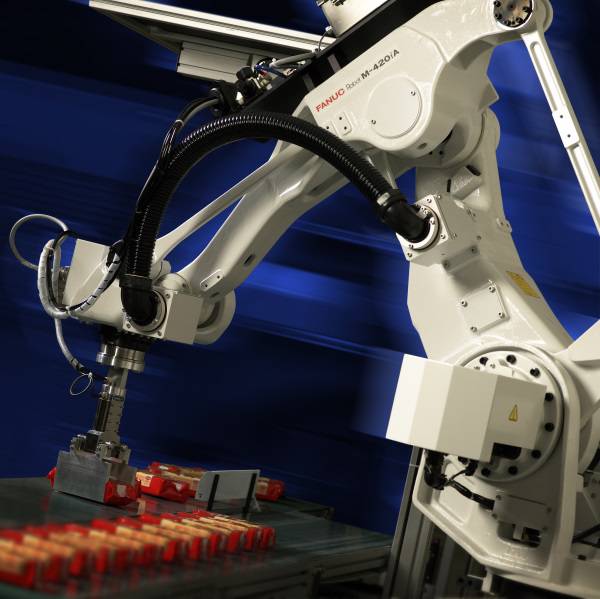
焊接机器人的特点首要表现在三个方面,分别是:
一、在机器人焊接设备运用的时分,它的运用作用十分好。
在运用的进程傍边,曾经可能在焊接的质量上面,不是特别的均匀。
可是现在在焊接的时分,就能够确保它的质量和质量十分的均匀,能够以数值的方式显示焊接的作用,关于了解焊接的状况能够给予帮助。
二、在焊接机器人焊接设备运用的时分,它能够进步出产的功率。曾经有职工来操作,出产的功率就会比较差。
可是现在选用的是机器人焊接的方法,就能够确保焊接的速度比较快,关于进步产品的产量能够有所帮助。
三、在运用机器人焊接设备的时分,它能够改进工人的劳动强度,能够防止焊接进程傍边关于身体的损伤。
焊接机器人的目标主要分为五个方面,这五个方面的特色和性质表现出了焊接机器人的五大目标。
1、适用的焊接办法和切开办法:
一般弧焊机器人只适用熔化极气体维护焊,不存在高频引弧会对机器人的操控和驱动体系干扰问题。
能否用于钨极ya弧焊,则决定于该机器人有没有特别抗干扰办法。
2、摇摆功用:
弧焊机器人有此要求。现有弧焊机器人的摇摆功用不同很大。选用能在空间范围内恣意设定摇摆方法和参数的机器人。
3、焊接P点示教功用:
对机器人示教是先示教焊缝上某一点的方位,后调整该点焊枪的姿势。
当调整姿势时,原示教点的方位应坚持不变。也就是机器人应能主动补偿因调整姿势所引起的P点方位的改变,***P点坐标,以方便示教操作者。
4、焊接工艺故障自检和自处理功用:
焊接经常呈现一些工艺故障,如弧焊时的粘丝、断丝、点焊时的粘电极等,若不及时采纳办法,则会发作损坏机器人或作废工件等大事端。
机器人有必要具有检出这类故障并实时主动泊车警告的功用。
5、引弧和收弧功用为了***焊接质量:
引弧和收弧时,需改变焊接参数,机器人在示教时应能设定和修正
焊接机器人工作场所的安全预防措施要怎么实现呢?首先请务必要***其作业区域和设备的整洁度,如果地面上有油、水、工具、工件等的话,可能会给操作人员带来安全隐患,引发严重事故。
其次,每当使用完工具之后都必须将其放回到焊接机器人动作范围外的原位置保存,避免焊接机器人与遗忘在夹具上的工具发生碰撞,造成夹具或机器人因此而受损。另外各项操作都完成之后,不要忘了还要打扫机器人和夹具。
而维护和检查焊接机器人的过程中,又该采取哪些安全预防措施?很简单,作为焊接机器人的工作人员,在作业之前必须穿着特定的工作服,佩戴安全鞋和安全帽,机器人视觉搬运,起到充分的保护作用。
其次,对于负责焊接机器人系统集成的人员、系统安全设备的设计、制造人员必须理解掌握安全护栏以及安全设备的,有必要通读手册了解出现紧急情况时需采取的正确操作和措施。
机器人视觉搬运-理想动力 机器人由天津理想动力科技有限公司提供。天津理想动力科技有限公司()坚持“以人为本”的企业理念,拥有一支技术过硬的员工队伍,力求提供好的产品和服务回馈社会,并欢迎广大新老客户光临惠顾,真诚合作、共创美好未来。理想动力——您可信赖的朋友,公司地址:天津市宁河区新华科技城B26-4,联系人:闫先生。
 在线问
在线问