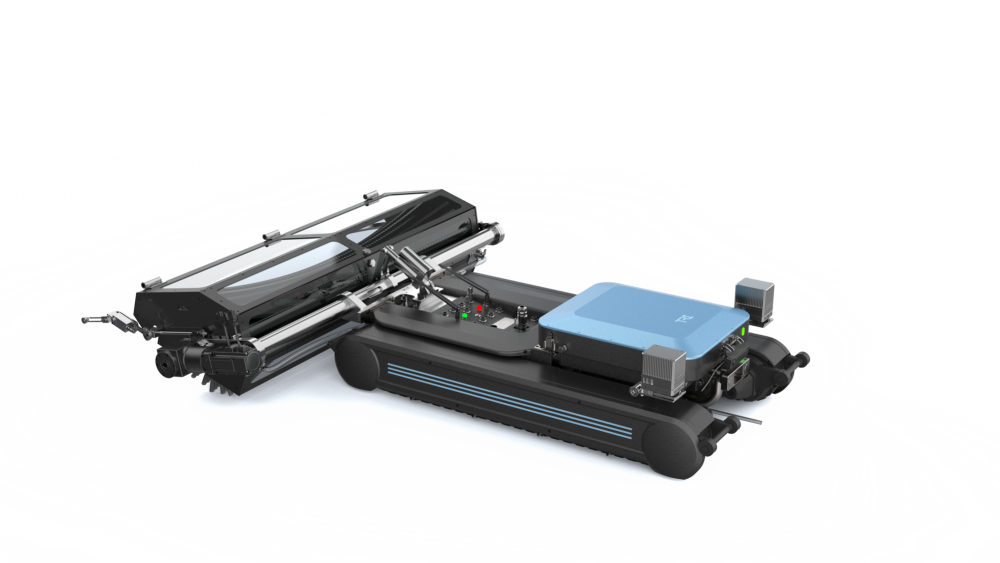
风电塔筒清洗检测机器人, 主要作业内容包括塔筒油污清洗以及焊缝无损检测, 同时 兼备全程的高清实时监控能力。该系统包含塔筒爬壁机器人本体、 带回收功能的油污 清洗模块、 具有高扬程的压力泵系统模块、 基于相控阵探伤技术的无损探伤仪模块、 高清摄像头监测模块等多种作业模块以及地面远程人员操控系统。 基于塔筒爬壁机器人工作现场工况, 爬壁机器人选用四轮框架结构, 以满足现场应用 需求。爬壁机器人移动单元主要由固连在车架单元的两个前置永磁驱动轮和两个后置 万向轮构成, 车架内置驱动电机、 直角减速器以及配套的驱动器等元器件。两个前置 驱动轮采用模块化设计, 由电机通过减速器驱动, 通过对每组驱动电机的转速进行调 整,完成左右两侧行走轮不同的转速调整,以形成差速形式,使车体转弯,该移动单 元能够实现车轮的高精度速度、 位置控制。两个后置万向轮组, 为无动力源的从动轮 设计方式, 凭借自身万向转动的灵活特性, 能够***实时跟随前驱动轮的运动轨迹, ***机器人平台的运动准确性。此外, 考虑到塔筒壁面为锥体, 曲率大且变化不唯 一, 在两个前置驱动轮与车体刚性固接的前提下, 为了***机器人对曲面的自适应能 力, 将两个后置万向轮与本体的连接方式设计为具有单个旋转自由度的柔性铰接方 式。这样前轮在保持与壁面的吸附,后轮可以跟随壁面曲率变化与起伏,***机器人在 塔筒壁面运动过程的稳定与灵活。
基于相控阵探伤技术的无损探伤模块主要由超声探头、 超声模块加持机构、 耦合液喷 嘴、 隔膜泵、 耦合液储存器等构成。加持机构固定在机器人主体平台前端, 隔膜泵抽 取耦合液通过喷嘴喷洒到焊缝等监测区域,超声探头完成焊缝探伤检测作业。 油污清洗回收模块主要由 3 组电动毛刷盘、喷头、清洗液储存器、隔膜泵及相应的辅 助加持机构组成。加持固接在主体平台上, 毛刷盘固接在加持机构上, 三组刷盘一字 排开,能够覆盖 780mm 宽的区域,加持机构为分段式设计,铰接位置能够调整相对 角度, 使得刷盘能够适应曲面曲率, ***清洁效率。同时, 毛刷盘由电机驱动做定向 旋转运动, 隔膜泵连接喷头及清洗液存储器, 将清洗液喷洒在毛刷清洁盘上, 利用清 洁盘的旋转动作实现油污的清洁。该模块还集成有带有刮条的污水回收仓, 可以将多 余的污水液体等导向收集到安装在平台腹部的空间, 进行污水回收, 避免污染其余壁 面。清洗液存储器容积为 4 升, 单个毛刷盘清洁面积为 0.12m2, 清洁幅宽为 780mm,可通过匹配合适的机器人运动速度,以***清洁效率。

 专业风机塔筒清洗、风机塔筒洗油公司迎光临
¥18.00
专业风机塔筒清洗、风机塔筒洗油公司迎光临
¥18.00