手机计算器遥控器等按键字符印刷缺陷检测-自动化视觉解决设备
¥56000.00
手机计算器遥控器等按键字符印刷缺陷视觉检测工业自动化成套解决方案
¥56000.00
标签缺陷检测-全智能视觉缺陷检测设备 工业自动化解决方案
¥56000.00
手机计算器遥控器等按键字符印刷缺陷检测-自动化视觉解决设备
¥56000.00
手机计算器遥控器等按键字符印刷缺陷视觉检测工业自动化成套解决方案
¥56000.00
标签缺陷检测-全智能视觉缺陷检测设备 工业自动化解决方案
¥56000.00
 手机计算器遥控器等按键字符印刷缺陷检测-自动化视觉解决设备
¥56000.00
手机计算器遥控器等按键字符印刷缺陷视觉检测工业自动化成套解决方案
¥56000.00
标签缺陷检测-全智能视觉缺陷检测设备 工业自动化解决方案
¥56000.00
手机计算器遥控器等按键字符印刷缺陷检测-自动化视觉解决设备
¥56000.00
手机计算器遥控器等按键字符印刷缺陷视觉检测工业自动化成套解决方案
¥56000.00
标签缺陷检测-全智能视觉缺陷检测设备 工业自动化解决方案
¥56000.00
项目需求:
机器视觉实现功能
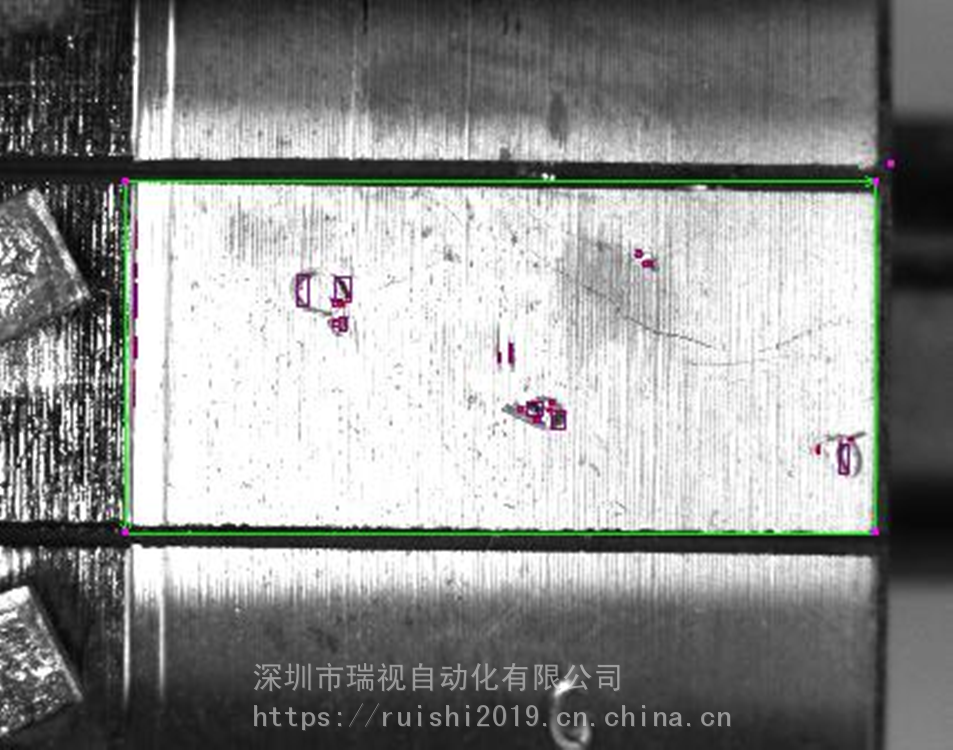
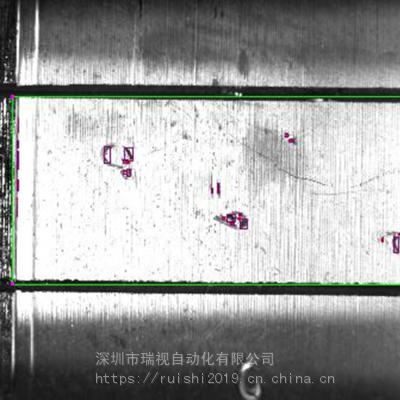
1.检测转子表面的铜砂
2.检测转子表面的撞坑
3.检测槽中的铜砂
4.检测脚歪
处理效果图& & 原理分析
初定位,先做预处理,进行blob分析,表面的撞坑
处理效果图& & 原理分析
初定位,先做预处理,进行blob分析,找到表面上的铜砂
处理效果图& & 原理分析
初定位,先做预处理,进行blob分析,找到槽内的铜砂
处理效果图& & 原理分析
定位脚,以角度判断是否歪斜
风险项
产品表面有金属拉丝纹路,可能导致较浅的撞坑漏判
2.贴近边缘的铜砂和撞坑有漏判的可能
3.判断脚是否歪斜,每个脚外形都有区别,目前没有经过大量测试
说明
1.做不同检测时,光源需要切换;
2.未综合考虑机械结构,硬件安装空间等因素,最终需按现场生产进行调节;
3.系统最终会以上位机可调试界面呈现,便于生产人员调试使用;
4.生产现场所使用的数据通讯及IO触点,按现场需求设计;
5.将检测结果发送至外围设备,完成产品剔除;
6.相机光源属于精密仪器,使用时注意规范,***其工作环境的温度和湿度,轻拿轻放,注意相机的供电电
压大小以及电源线和网线不要混插。
 在线问
在线问