1)引言在高校自动驾驶实验室里,团队可能常以 BEV(Bird’s-Eye View)感知架构为研究主线。旨在通过相机阵列和激光雷达的数据,在空间上重建统一的车周环境,为下游检测、分割提供高精度“语义地图”。然而,一旦相机间的时间同步存在几十毫秒及以上的误差,BEV 投影的理想模型便可能失效,引发一系列典型的问题:
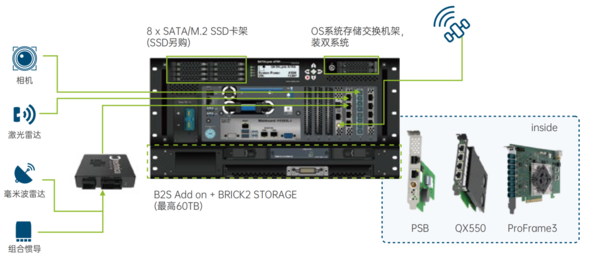
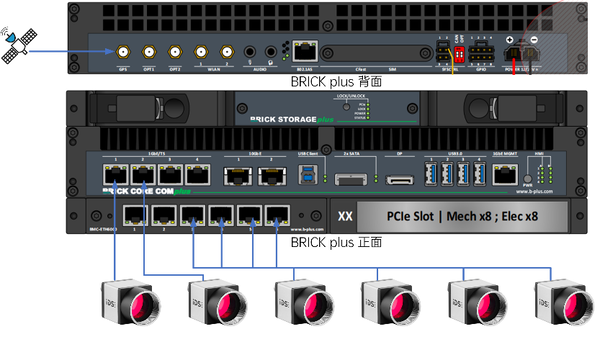
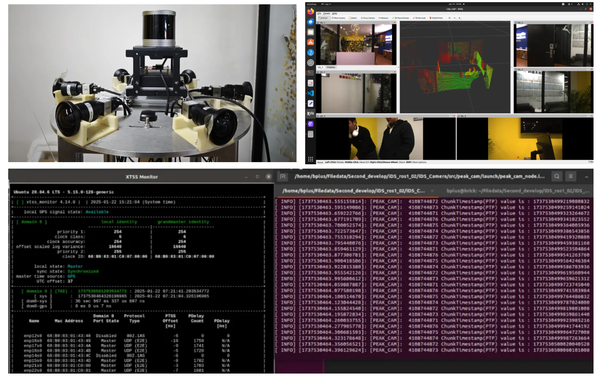
这些消耗巨量算力与人力的痛点,其根源往往不在于算法本身,而在于数据基石存在缺陷 —— 即传感器间缺乏统一可信的时间基准,导致时序准确性无法保障。 由此可知,对高校自动驾驶实验室来说,稳定的时序精度是BEV感知科研的关键,团队亟需适配多源异构传感器的高精度时间同步方案,解决数据撕裂、实验不可复现等痛点。 本文将拆解时间同步核心难题,介绍多传感器时间同步方案概况与应用价值,旨在帮助高校团队实现高质量、可复现、省算力的多传感器时间同步落地方案。 2)时间同步核心挑战多源异构传感器时间同步的核心挑战集中在 “时钟一致性、链路稳定性、时间戳准确性” 三大维度: 2.1 独立时钟温漂系统中的每个传感器(相机、激光雷达等)都有独立晶振,其内部晶振的频率存在ppm级别固有偏差。这导致各传感器的本地时间以微小但不可忽略的差异流逝。如同每位参与者使用走时精度稍有不同的秒表,误差会随采集时长持续累积,即使初始同步,几分钟后也可能出现毫秒级的偏差。 2.2 触发与传输链路延迟采用软件触发时会受到操作系统调度制约,引入毫秒级的随机抖动。此外,数据流经不同的物理接口和协议,其固有延迟各不相同。例如,GigE Vision相机、CAN总线雷达、GMSL相机等设备即便同一时刻下发触发,数据流入主机时刻仍然错位。 2.3 滞后的时间戳若在数据进入操作系统内核或应用层后才为其打上时间戳,那么这个时间戳已经叠加前述所有的触发和传输延迟的影响。用这个“被污染”的时间戳进行数据对齐,会导致后续的融合与算法都建立在错误的前提之上。理想的时间戳,是必须在数据离开传感器物理层或进入物理链路的瞬间被标记。 3)康谋方案概述及科研价值3.1方案概述康谋多源异构传感器纳秒级时间同步解决方案(简称康谋多传感器时间同步方案)是一套基于 XTSS 服务的完整时间同步体系:以 DATALynx ATX4 或 BRICK2 作为 PTP Grandmaster(主时钟),通过 IEEE 1588 PTP 高精度协议抵消各传感器独立晶振的 ppm 级温漂误差; 同时借助 QX550、ProFrame3 等硬件直接对接传感器物理层,在数据离开传感器的瞬间完成时间戳记录,规避‘滞后时间戳’问题;并通过硬件触发替代软件触发,减少操作系统调度抖动,最终构建纳秒级精度的统一时间基准,通过 ADTF/ROS 等软件框架贯穿数据处理链路,实现从微秒级‘软件对齐’到纳秒级‘硬件同步’的工程跨越。
3.2高校科研价值康谋多传感器时间同步方案从数据质量、实验效果、资源利用、教学落地四大维度,可为高校自动驾驶科研与教学提供核心支撑:
1.数据集质量提升:精准时间戳有效抑制 BEV、Multi-View Stereo、Sensor Fusion 等数据中的重影与漂移,减少重复录制。 2.实验可复现:统一时钟使得同样的实验脚本在不同采集日、不同实验车辆上保持一致性,便于论文补充材料和开源共享。 3.算力资源节省:避免因时间错位导致的模型不收敛,可少跑许多无效训练,节省 GPU 配额。 4.教学项目落地:课程设计可直接使用康谋的工程案例,快速搭建“采集-标注-训练-评估”闭环。
4)结语康谋多源异构传感器纳秒级时间同步解决方案,基于 XTSS 服务的时间同步体系,以 PTP 高精度协议、硬件触发与物理层打戳为核心,构建纳秒级统一时间基准,从根源上解决了多源异构传感器的时序对齐难题。 该方案既能提升数据集质量、保障实验可复现性、节省 GPU 算力资源,也可通过现成工程案例助力教学项目快速搭建 “采集 - 标注 - 训练 - 评估” 闭环,可为高校自动驾驶科研与教学提供核心支撑! |