 Ingenia直流驱动器-- 面板安装 NIX系列
¥4762.00
Ingenia直流驱动器-- 面板安装 冥王星PLUTO系列
¥2999.00
Ingenia直流驱动器-- 面板安装 NIX系列
¥4762.00
Ingenia直流驱动器-- 面板安装 冥王星PLUTO系列
¥2999.00
 Ingenia直流驱动器-- 面板安装 NIX系列
¥4762.00
Ingenia直流驱动器-- 面板安装 冥王星PLUTO系列
¥2999.00
Ingenia直流驱动器-- 面板安装 NIX系列
¥4762.00
Ingenia直流驱动器-- 面板安装 冥王星PLUTO系列
¥2999.00
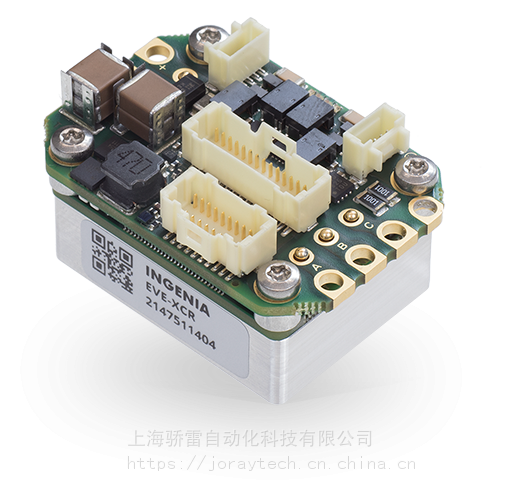
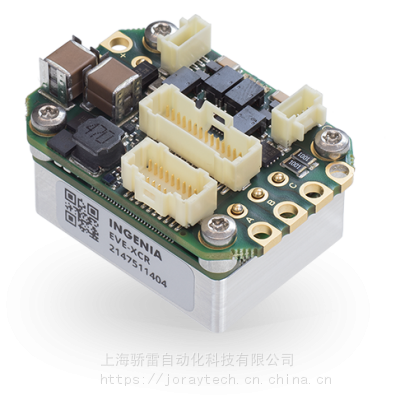
EVEREST XCR ETHERCAT伺服驱动器
Everest XCR是我们伺服驱动器系列中的一款超紧凑,随时可用的高功率密度电机控制器。由于其体积小巧且坚固耐用,它几乎可以安装在任何地方:协作机器人关节,可穿戴机器人,无人地面或空中飞行器以及内部电动机。然而,珠穆朗玛峰不仅是直流伺服驱动器。珠穆朗玛峰还采用了世界上进的晶体管技术,具有的功率密度和效率,同时保持了可忽略的EMI,并提供了线性放大器性能。Everest XCR版本也可与CANopen通信一起使用。
EVEREST XCR ETHERCAT伺服驱动器亮点:
机器人关节的微型尺寸,持续:30A,80V
尺寸(mm):26x35x14mm
双回路支持
16位高分辨率扭矩感应
超快速伺服回路,可实现平稳运行可以用了
机器人和执行器集成
Everest XCR可以立即使用,并且可以集成在机器人关节和执行器内部。铝制主体确保了的散热效果,并且可以通过提供的螺孔轻松固定到机箱上。
双电源或单电源
Everest XCR可以通过单电源或双电源供电(逻辑和电源分开)。使用低逻辑电压的双电源将使您减少待机状态下驱动器的功耗。
***的电流感应
内置的可配置增益电路使您可以配置Everest XCR电流测量的分辨率,范围从低至0.379 mA /计数到2.475 mA /计数。这使Everest驱动器成为最通用的电动机控制器之一,能够以几瓦到几千瓦的额定电流控制电动机。
菊花链式BISS-C
用一根电缆连接两个高分辨率值编码器不是很好吗?Everest XCR支持BiSS-C编码器的菊花链连接,帧大小为64位。
主要特点:
超小占地面积,26x35x14mm
直流80 V ,连续30 A
效***达99%
高达75 kHz的电流环路,25 kHz伺服环路
10 kHz~100 kHz PWM频率
具有VGA的16位ADC,用于电流检测
支持霍尔,正交编码器,SSI和BiSS-C
多达4个同时反馈源
全电压,电流和温度保护
安全扭矩关闭(STO SIL3 Ple)输入
典型应用:
协作机器人关节
机器人外骨骼
穿戴式机器人
货车
无人机
工业高度集成的伺服电机
智能马达
电池供电和电动出行
低电感电动机
支持的电机类型 |
| |
功率级PWM频率(可配置) | 10 kHz,20 kHz(默认),50 kHz和100 kHz | |
电流感应 | 三相,基于并联的电流检测。16位ADC分辨率。精度为满刻度的± 2%。 | |
电流感应分辨率(可配置) | 电流增益可在4个范围内配置:
| |
电流检测范围(可配置) | 4种可配置电流增益的电流范围:
| |
电流回路频率 | 75 kHz的 | |
伺服回路频率(位置和速度) | 25 kHz @ 75 kHz电流环路 | |
反馈 |
| |
支持的目标来源 |
* CANopen是默认启用的通讯。为了使用EtherCAT,必须更新固件。 | |
控制方式 |
| |
输入/输出和保护 | ||
通用输入和输出 | 4 x非隔离单端数字输入-5 V逻辑电平和3.3 V兼容。可以配置为:
4个非隔离单端数字输出-5 V逻辑电平(具有470Ω串联电阻的连续短路能力)-值8 mA。当前。可以配置为:
1 x±10 V,16位全差分模拟输入,用于称重传感器或扭矩传感器。可由主控读取,以关闭扭矩环。 | |
分流制动电阻输出 | 可通过任何数字输出进行配置(参见上文)。 启用此功能将需要一个外部晶体管或电源驱动器。 | |
电机制动输出 | 1 A,50 V,专用制动输出。用再循环二极管开漏。 可以正确配置制动启用和禁用定时。 | |
安全转矩关闭输入 | 2个专用的隔离(> 4GΩ,1 kV)STO输入(3.3 V至30 V)。 STO输入包括一个~5 mA的限流器,以程度地减少损耗。 | |
电机温度输入 | 1 x专用,5 V,12位单端模拟输入,用于电机温度(1.65kΩ上拉至5 V)。 支持NTC,PTC,RTD,线性电压传感器,硅基传感器和开关。 | |
保护装置 |
| |
运营沟通 | ||
CANopen(默认情况下) | 符合CiA-301,CiA-303,CiA-305,CiA-306和CiA-402(4.0)。 125 kbps至1 Mbps(默认)。非孤立。不包括终端电阻。 注意:当配置为CANopen时,以太网端口仍可用于配置驱动器。 | |
EtherCAT (可选软件) | 通过EtherCAT(CoE)进行CANopen 通过EtherCAT(FoE)归档 EtherCAT以太网(EoE) 注意:CANopen是默认启用的通信。为了使用EtherCAT,必须更新固件。 | |
Ingenia是一家伺服驱动器公司。我们的伺服驱动器可在进的机器人技术和工业应用中准确可靠地控制电动机。
我们隶属于Novanta Inc.(纳斯达克股票代码:NOVT)的运动控制业务Celera Motion,并在全球开展业务,在英国,美国和德国设有办事处,并拥有国际代理商网络。
Ingenia伺服驱动器针对每种应用量身定制。Ingenia产品不着眼于产品范围和市场,而是根据特定的客户和应用进行设计的,因此进行了相应的设计,以提供的配合,形式和功能。
我们的目标是通过开发医疗,通信和自动化领域的创新应用来对我们的世界产生积极影响。我们通过精益和以客户为导向的方法来启用此应用程序,从而推动我们提供***电机控制产品和解决方案。
 在线问
在线问