- 商品
- 详情



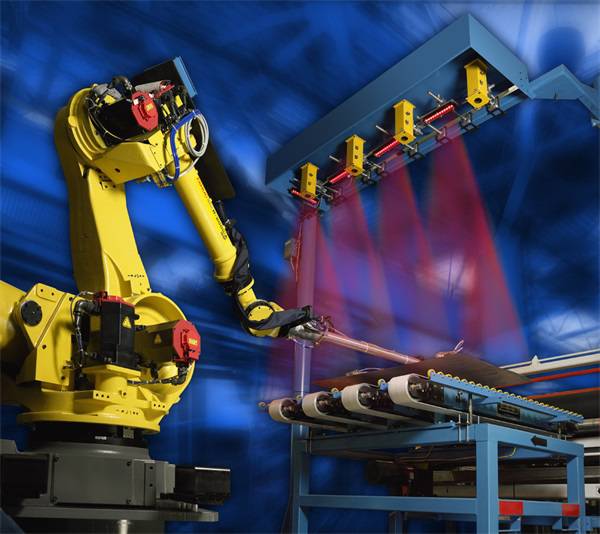
焊接机器人的特点首要表现在三个方面,分别是:
一、在机器人焊接设备运用的时分,它的运用作用十分好。
在运用的进程傍边,曾经可能在焊接的质量上面,不是特别的均匀。
可是现在在焊接的时分,就能够确保它的质量和质量十分的均匀,能够以数值的方式显示焊接的作用,钢结构焊接机器人价格,关于了解焊接的状况能够给予帮助。
二、在焊接机器人焊接设备运用的时分,天津钢结构机器人焊接,它能够进步出产的功率。曾经有职工来操作,出产的功率就会比较差。
可是现在选用的是机器人焊接的方法,天津钢结构焊接机器人,就能够确保焊接的速度比较快,关于进步产品的产量能够有所帮助。
三、在运用机器人焊接设备的时分,它能够改进工人的劳动强度,能够防止焊接进程傍边关于身体的损伤。
运用机器人焊接的话,就能够让它的作用要更好一些。不过机器人焊接怎么样,这就要看企业在设备收购的时分,到底是经过什么样的途径购买的什么样的品牌。购买的品牌不同,运用的作用就会存在必定的差异,这是一切的用户必定要注意的当地。
一般在产品购买的时分,能够先到商场当中去比照一下。不同品牌的产品会存在怎样的差异,必定要购买运用作用比较稳定的,并且在运用的时分故障率比较低的,焊接机器人,这样在运用的时分才能够关于出产有必定的***。别的一个品牌里面有许多不同的类型标准,企业能够了解不同类型标准的特色,这样来进行产品的挑选才是理想化的挑选方法。
焊接机器人的使用不同,分类也不同,不过尽管分类比较多,可是依据命名可以简略分辨出焊接机器人的类型和特性。
1、直角坐标机器人。
三个棱柱关节,其轴线按直角坐标装备,运动学模型简略直观,需求较大的操作空间,多做成大型龙门式或框架式机器人。
2、圆柱坐标机器人。
手臂至少有一个反转关节和一个棱柱关节,其轴线按圆柱坐标装备,运动学模型简略直观,易于进入开口部分。
3、极坐标机器人。
手臂有两个反转关节和一个棱柱关节,其轴线按极坐标装备,运动学模型较杂乱,占用空间较小,操作范围大且灵敏。
4、关节机器人。
三个反转关节,具有好的操作灵敏性和可达性,作业空间大,运动学模型较杂乱,视觉上不直观,结构刚度较差。
5、SCARA机器人。
它有三个旋转关节和一个移动关节,为水平关节型结构,和婉性好,可以实现高精度和高速度运动。
钢结构焊接机器人价格-理想动力-焊接机器人由天津理想动力科技有限公司提供。天津理想动力科技有限公司()拥有很好的服务与产品,不断地受到新老用户及业内人士的肯定和信任。我们公司是***商盟认证会员,点击页面的商盟客服图标,可以直接与我们客服人员对话,愿我们今后的合作愉快!
 在线问
在线问